
Electronique
> Réalisations
>
Affichage
/
Mesures > Enc-LED-Ring 002 (encodeur avec anneau LED)
Dernière mise à jour : 31/08/2025Présentation
Ce circuit comporte sur un même circuit imprimé un encodeur rotatif et un anneau de 12, 15 ou 20 LED.
Par rapport à la version Enc-LED-Ring 001, ce modèle présente une particularité : celle de transmetre une valeur numérique comprise entre 0 et 255 ou un caractère "+" ou "-", selon le sens de rotation de l'encodeur. Pour cela, un petit microcontrôleur PIC24 a été mis à contribution. Il assure à lui seul le "décryptage" des signaux en quadrature A et B de l'encodeur, le pilotage/affichage des LED et la transmission des données sur un port série. Quatre circuits ont été étudiés :
- Schéma 002a : version avec PIC24F04KA200 et 12 LED, modes Point et Ruban- Schéma 002b : version avec PIC24F04KA200 et 15 LED, mode Ruban seul
- Schéma 002c : version avec PIC24F04KA200 et 20 LED, mode Ruban seul
- Schéma 002d : version avec PIC24F08KA101 et 20 LED, modes Point et Ruban
La limitation "mode ruban seul" des versions 002b et 002c est liée à la taille mémoire programme du PIC24F04KA200 qui n'est que de 4K et insuffisante pour tout faire avec 15 ou 20 LED, raison pour laquelle le PIC24F08KA101 avec ses 8K de mémoire est venu à la rescousse pour la version 002d.
Schéma 002a (12 LED avec PIC24F04KA200)
Le schéma révèle le coeur du montage : un encodeur EC12D à contacts mécaniques et un PIC24 pour la gestion de l'ensemble.
Schéma 002b (15 LED avec PIC24F04KA200)
Idem schéma 002a, mais avec 15 LED au lieu de 12.
Schéma 002c (20 LED avec PIC24F04KA200)
Idem schéma 002a, mais avec 20 LED au lieu de 12.
Schéma 002d (20 LED avec PIC24F08KA101)
Changement de PIC pour un petit complément de resources mémoire programme bienvenu.
Fonctionnement
Le fonctionnement de base est identique pour toutes les versions :- décodage du sens de rotation de l'encodeur rotatif
- affichage LED sur anneau 12, 15 ou 20 éléments
- transmission de données au format série UART-TTL
Décodage des signaux A et B
L'encodeur rotatif EC12D permet d'obtenir les deux signaux en quadrature de phase sur les broches A et B quand l'axe est mis en mouvement dans un sens ou dans l'autre. Ce modèle équipé de contacts mécaniques ne réclame aucune alimentation, contrairement aux encodeurs équipés de LED. Les broches A et B de l'encodeur sont directement reliées à deux broches du microcontrôleur PIC24 configurées en entrées avec pullup internes activées. Quand les contacts mécaniques se ferment, on dispose de signaux logiques actifs à l'état bas qui provoquent des interruptions au sein du PIC.Affichage LED
L'affichage LED se fait en mode Point ou en mode Ruban. Dans le mode Point, une seule LED au maximum peut être allumée à tout instant. En mode Ruban, plusieurs LED peuvent s'allumer "en même temps". Dans le second cas, la consommation moyenne de courant est plus élevée, tout en restant modeste (environ 20 mA). Le microcontrôleur PIC24 assure l'affichage en mode multiplexé des LED selon un principe astucieux qui permet de n'utiliser que 4 ou 5 lignes d'entrée/sortie (méthode expliquée à la page Affichage Multiplexé). C'est grâce à ce principe qu'on peut ici se contenter d'un boitier 14 broches pour assurer la totalité des fonctions.Remarque : pour la version 12 LED, 4 lignes d'entrée/sortie suffisent. Si j'en ai utilisé 5, c'est pour assurer la compatibilité de câblage entre les 3 versions 12/15/20 LED.
Chacune des LED travaille sur une période de temps partagé : 1/12 du temps total pour la version à 12 LED, 1/20 du temps pour la version à 20 LED. La vitesse de rafraichissement global est de 1 kHz, soit environ 83 Hz pour chaque LED dans la version 12 LED, ou encore 50 Hz pour la version 20 LED. Ce rythme est assez élevé pour limiter le risque de scintillement gênant.Synchronisation avec votre système
Les données émises (Tx) ou reçues (Rx) par l'encodeur 002a respectent le format de transmission série (UART) suivant :19200 bauds, 8 bits data, 1 bit stop, sans parité
Un seul octet est nécessaire pour définir la valeur transmise, cette dernière sera donc limitée à la plage 0-255.
Transmission
Au repos, quand l'encodeur mécanique n'est pas manipulé, aucune donnée n'est transmise sur la sortie Tx. Dès qu'une rotation vers la gauche ou la droite est detectée, un octet est transmis sur la sortie Tx. Cet octet représente :- logiciels version hexa : valeur en cours, comprise entre 0 et 255
- logiciels version ascii : sens de rotation, caractère "+" pour incrémentation ou "-" pour décrémentation
Réception
Votre système peut transmettre des données sur l'entrée Rx de l'encodeur 002a afin de le synchroniser lors de la mise sous tension, pour permettre un affichage LED autre que "0" et correspondant à une valeur mémorisée dans votre système (preset ou recall). Les données reçues par l'encodeur sont retransmises en écho pour valider leur bonne prise en compte. Un buffer circulaire de 128 octet permet au système de digérer de grandes quantités de données entrantes dans de courts intervales de temps.La valeur à transmettre pour allumer une ou plusieurs LED peut être comprise entre 1 et 248. Le bit de poids fort (bit #7) détermine le mode d'affichage Point (bit7=0) ou Ruban (bit7=1). Ainsi, toute valeur inférieure à 128 correspond au mode d'affichage Point, alors que toute valeur supérieure à 128 correspond au mode ruban. Le tableau ci-après résume les valeurs acceptées.
Pilotage de 12 LED (schéma 002a)
| Mode Point | Mode Ruban | |
| Aucune LED allumée | 0, 128 | |
| LED1 | 1~10 | 129~138 |
| LED2 | 11~20 | 139~148 |
| LED3 | 21~30 | 149~158 |
| LED4 | 31~40 | 159~168 |
| LED5 | 41~50 | 169~178 |
| LED6 | 51~60 | 179~188 |
| LED7 | 61~70 | 189~198 |
| LED8 | 71~80 | 199~208 |
| LED9 | 81~90 | 209~218 |
| LED10 | 91~100 | 219~228 |
| LED11 | 101~110 | 229~238 |
| LED12 | 111~120 | 239~248 |
| Aucun changement | 121 à 127, 249 à 255 | |
Pilotage de 20 LED (schéma 002d)
| Mode Point | Mode Ruban | |
| Aucune LED allumée | 0, 128 | |
| LED1 | 1~6 | 129~134 |
| LED2 | 7~12 | 135~140 |
| LED3 | 13~18 | 141~146 |
| LED4 | 19~24 | 147~152 |
| LED5 | 25~30 | 153~158 |
| LED6 | 31~36 | 159~164 |
| LED7 | 37~42 | 165~170 |
| LED8 | 43~48 | 171~176 |
| LED9 | 49~54 | 177~182 |
| LED10 | 55~60 | 183~188 |
| LED11 | 61~66 | 189~194 |
| LED12 | 67~72 | 195~200 |
| LED13 | 73~78 | 201~206 |
| LED14 | 79~84 | 207~212 |
| LED15 | 85~90 | 213~218 |
| LED16 | 91~96 | 219~224 |
| LED17 | 97~102 | 225~230 |
| LED18 | 103~108 | 231~236 |
| LED19 | 109~114 | 237~242 |
| LED20 | 115~120 | 243~248 |
| Aucun changement | 121 à 127, 249 à 255 | |
Une valeur de 0 ou 128 provoque l'extinction de toutes les LED, et une valeur comprise dans la plage [121..127] ou dans la plage [249..255] n'engendre aucun changement. La partie de code utilisée dans le PIC pour l'affichage des LED en fonction de la valeur en cours (ou dernièrement reçue) est la suivante (pour la version à 12 LED) :
procedure Disp_ValueToLEDs(iVal:
byte);
begin
if ((iVal >= 121) and (iVal <= 127)) or (iVal
>= 249) then exit;
iLEDs := $00;
iLEDs.1 := (((iVal >= 001) and (iVal
<= 010)) or (iVal >= 129));
iLEDs.2 := (((iVal >= 011) and (iVal
<= 020)) or (iVal >= 139));
iLEDs.3 := (((iVal >= 021) and (iVal
<= 030)) or (iVal >= 149));
iLEDs.4 := (((iVal >= 031) and (iVal
<= 040)) or (iVal >= 159));
iLEDs.5 := (((iVal >= 041) and (iVal
<= 050)) or (iVal >= 169));
iLEDs.6 := (((iVal >= 051) and (iVal
<= 060)) or (iVal >= 179));
iLEDs.7 := (((iVal >= 061) and (iVal
<= 070)) or (iVal >= 189));
iLEDs.8 := (((iVal >= 071) and (iVal
<= 080)) or (iVal >= 199));
iLEDs.9 := (((iVal >= 081) and (iVal
<= 090)) or (iVal >= 209));
iLEDs.10 := (((iVal >= 091) and (iVal <= 100))
or (iVal >= 219));
iLEDs.11 := (((iVal >= 101) and (iVal <= 110))
or (iVal >= 229));
iLEDs.12 := (((iVal >= 111) and (iVal <= 120))
or (iVal >= 239));
end;
Dans le code qui précède, on distingue dans chaque ligne iLEDs.x := la portion qui assure l'allumage en mode Point (condition de gauche) et celle qui assure l'allumage en mode Ruban (condition de droite).
Affichage en mode Point ou Ruban
Comme vu précédemment, le mode d'affichage dépend avant tout de la valeur en cours, à savoir mode Point pour les valeurs inférieures à 128 et mode Ruban pour les valeurs supérieures à 128. Pour basculer d'un mode d'affichage à l'autre en mode manuel (par rotation de l'axe de l'encodeur), il suffit désormais de presser brièvement le bouton-poussoir de l'encodeur lui-même. Cette possibilité de basculer entre les modes Point et Ruban par pression du bouton-poussoir de l'encodeur n'est implémentée que pour la version 002d avec PIC24F08KA101.
Remarque : les données série reçues sont toujours prioritaires sur le mode d'affichage en cours. Si une rotation manuelle de l'encodeur a engendré une valeur de 45 et que le mode d'affichage en cours est le mode Point, alors la réception d'une valeur de 173 occasionnera le basculement automatique en mode ruban.
Utilisation du système
La sortie Tx de l'encodeur 002a doit aboutir à l'entrée Rx de votre système, et l'entrée Rx de l'encodeur 002a doit aboutir à l'éventuelle sortie Tx de votre système (câblage facultatif pour cette deuxième liaison).
Prototype
Réalisé pour la version 002d avec PIC24F08KA101 (PIC24F16KA101 sur mon proto).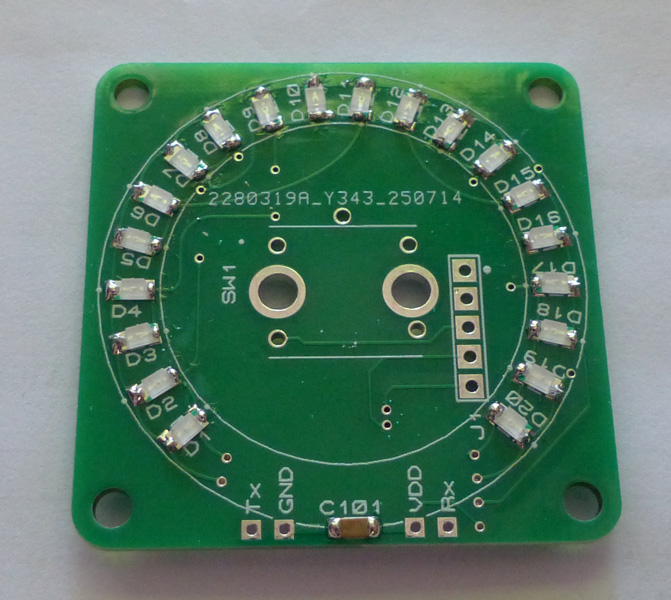
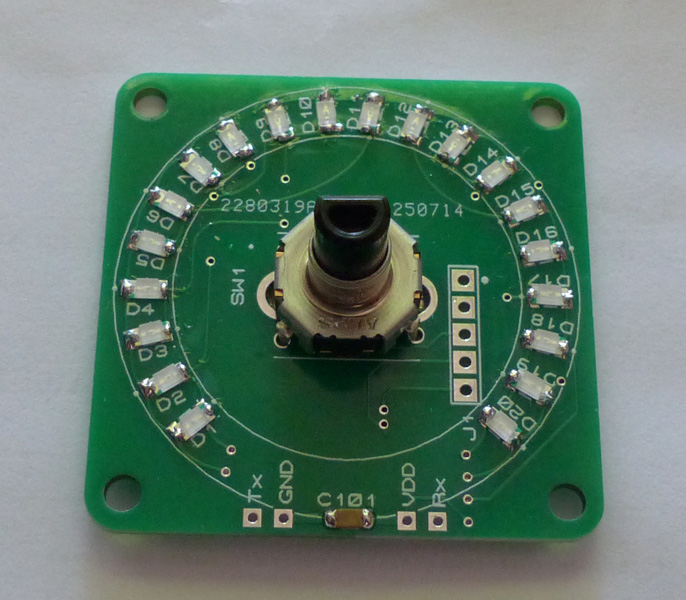
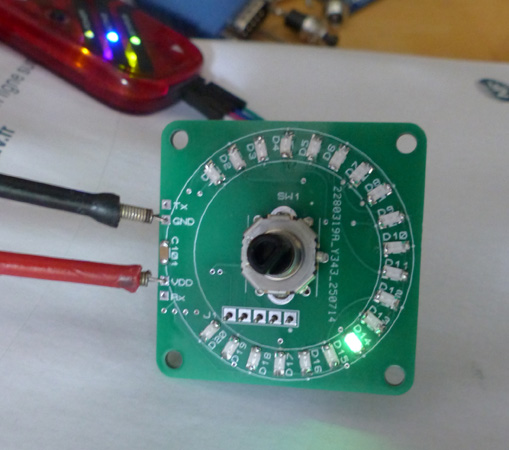
Pour les tests préliminaires et avant de souder l'encodeur, j'ai ajouté un bout de code au programme du PIC pour faire s'allumer les LED les unes après les autres au moment de la mise sous tension. J'ai ensuite apporté les corrections logicielles qui s'imposaient, car bien évidement tout n'a pas fonctionné correctement du premier coup.
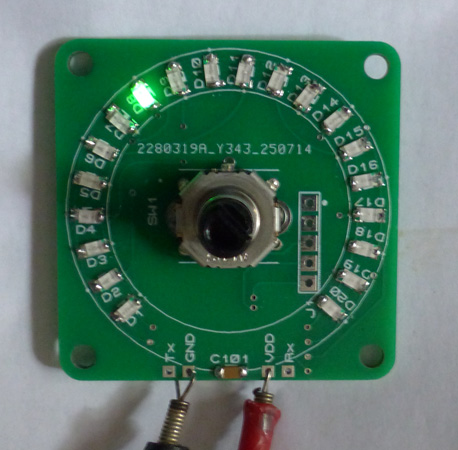
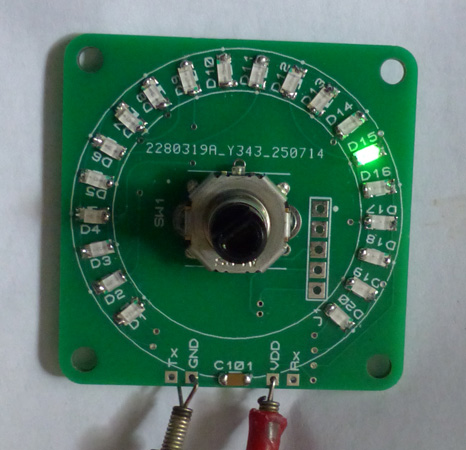
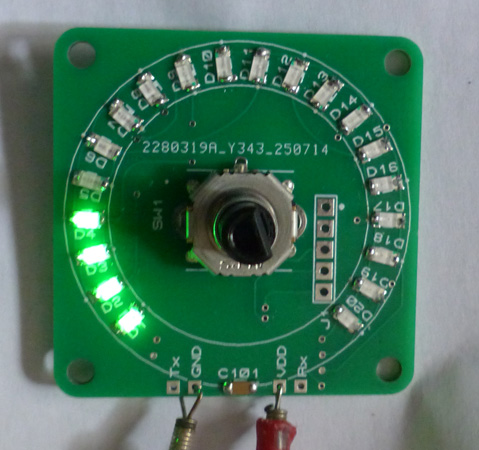
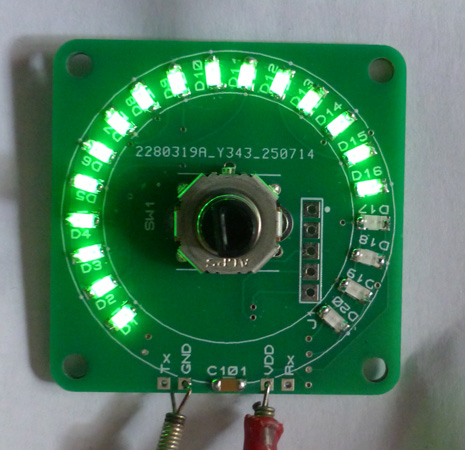
Le circuit fonctionne correctement en l'état, mais il faut plusieurs pas de rotation de l'encodeur pour passer d'une LED à la suivante ou à la précédente. Cela est tout à fait normal, puisqu'une même LED peut s'allumer pour plusieurs valeurs contigues (20 LED pour 120 pas). Bien entendu, cela pourrait être modifié dans le code du logiciel si cela s'avérait nécessaire.
Logiciels du PIC
Les fichiers binaires compilés *.hex à flasher dans le PIC sont disponibles dans l'archive zip ci-après.Enc-LED-Ring_002x - 24FxxKAxxx - (03/08/2025 et 30/08/2025)
Si vous souhaitez recevoir par la poste un PIC préprogrammé et prêt à utiliser, merci de consulter la page PIC - Sources.
Circuits imprimés (PCB)
Tous sont réalisés en double face. Les trois circuits 002a, 002b et 002c avec PIC24F04KA200 ont une base identique, mais les PCB sont forcément différents du fait que chacun héberge un nombre de LED différent.
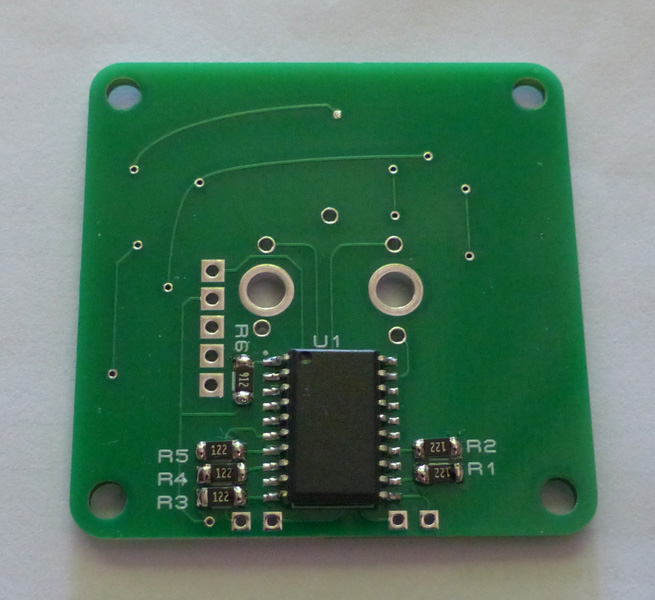
Le circuit 002d avec PIC24F08KA101 est le plus complet et le boîtier du PIC est un SOP (espacement broches de 1,27 mm), nettement plus facile à souder que le boîtier SSOP du PIC24F04KA200 (espacement broches de 0,65 mm).
Pour toutes les versions, le PIC et les résistances de limitation de courant des LED sont câblés "côté soudure".
Historique
31/08/2025
- [002d] Ajout possibilité de basculer entre les modes
d'affichage Point et Ruban par pression sur le bouton-poussoir de
l'encodeur optique.
03/08/2025
- [002d] Ajout photos prototype.
- [002d] Correction erreur câblage PGC/PGD (inversion de ces deux broches) sur le connecteur ICSP. Schéma et PCB mis à jour.
-
[002d] Correction sens de déroulement (une rotation dans le sens
horaire décrémentait la valeur en cours). Logiciel mis à jour.
13/07/2025
- Première mise à disposition