Dernière mise à jour :
08/05/2025
Présentation
Quoi de plus banal qu'une télécommande ? Elles ont envahi
notre quotidien, pour changer la chaîne reçue sur un téléviseur, pour
avancer ou reculer dans un film enregistré sur DVD, pour ouvrir la porte
d'accès au garage, pour verrouiller les portières de voiture ou pour
modifier la couleur de l'éclairage ambiant installé au
salon. Mais comment fonctionne une télécommande, au juste ? C'est ce
que nous allons voir ici, dans les grandes lignes.
Télécommande filaire
Les
télécommandes à fils sont les plus simples à réaliser, tout du moins si
on se contente de ne transmettre qu'une seule information. On peut en
effet se contenter d'un simple interrupteur déporté. Si on veut
transmettre d'un point à un autre une information variable (changement
de volume par exemple) ou plusieurs ordres de télécommandes (changement
de chaîne), il peut être nécessaire d'installer plusieurs fils. Ce qui
en pratique peut encore convenir tant qu'on ne dépasse pas quatre fils
car un banal câble deux paires téléphonique peut suffire. Mais ce
type de solution ne convient bien que pour les besoins suivants :
-
on n'a pas besoin d'une grande fiabilité, une commande perdue
n'est pas critique et la réception d'un parasite est
tolérée;
- on n'a pas besoin d'envoyer un nombre important d'ordres différents.
Les
limitations d'un système aussi simple portent principalement sur les
possibilités offertes (nombre d'ordres possibles) et sur la sensibilité
élevée du système aux perturbations externes (parasites). Un fil
de quelques mètre est suffisant pour récupérer un tas de cochonneries,
surtout de nos jours où on est envahi par les rayonnements
électromagnétiques des téléphones portables, des accès wifi et autres
parasites divers provoqués par les équipements électroniques
domestiques
et industriels. On peut bien sûr utiliser un câble blindé (avec une
tresse de masse), mais le coût n'est alors plus du tout le même, et la
"sécurité" offerte par un tel type de câble reste relativement mauvaise
au delà de quelques mètres de distance, à moins de travailler en
différentiel, comme c'est le cas par exemple avec des liaison de type
RS422 ou RS485. On peut dire qu'aujourd'hui ce type de télécommande est
démodé, mais ce n'est pas une raison pour la rejeter systématiquement.
Il faut dire qu'au-delà des capacités techniques propres d'un système
de télécommande (nombres d'ordres qu'on peut gérer), vient se greffer
le confort du sans fil. Il faut bien admettre qu'on a du mal à
faire marche arrière.
Utilisation d'une porteuse
Le
procédé décrit précédement convient bien pour deux appareils émetteur
et récepteur reliés directement entre eux, si ces derniers ne sont
pas trop distants (quelques mètres au maximum entre les deux). Si on
veut parcourir de grandes distances (par exemple 300 m ou 2 km), ce
procédé ne convient plus. Prenons l'exemple d'une lettre que vous
voulez envoyer à votre voisin ou voisine. La distance est courte et
vous allez déposer vous-même l'enveloppe dans sa boite aux lettre.
Si le destinataire se trouve à plusieurs km, vous allez déposer
l'enveloppe à La Poste, qui servira d'intermédiaire, de
transporteur.
Et bien pour les ordres de télécommande, on peut faire de
même : quand le destinataire est loin, on se sert d'une
porteuse
qui transporte le message d'un bout à l'autre. Ce procédé est plus
difficile à mettre en oeuvre et conduit à un coût de fabrication plus
élevé, mais il est bien plus sûr (voir page
Emission / réception pour détails supplémentaires). C'est d'ailleurs la seule façon de
faire pour certaines applications, tel qu'interphones sans fils (AM ou
FM) et courants porteurs pour liaisons informatiques (CPL) qui
utilisent tous deux les fils du secteur pour véhiculer des informations
analogiques ou numériques (voir plus loin sur cette même page). Notez
que l'utilisation d'une porteuse pour
véhiculer le message à transmettre est chose courante dans un tas
d'applications de tous les jours, et qu'elle ne repose pas forcement
sur un fil physique. Le téléphone portable, la radio FM, la
télévision et les télécommandes infrarouge des postes TV et lecteurs
DVD (pour ne citer qu'eux) font usage d'une porteuse dont la fréquence
est plus ou moins élevée (38 kHz pour la télécommande IR, 100 MHz pour
la radio FM, 900 MHz ou 1800 MHz pour le GSM). Mais pour ces dernier le
support de transmission est les airs et non plus un simple fil.
Télécommande à courants porteurs
Ce
type de télécommande permet de se servir d'un réseau de transport
existant pour transporter des informations complémentaires non prévues
à l'origine. Le réseau EDF est un exemple de support existant prévu en
temps normal pour véhiculer la tension secteur à basse fréquence (50
Hz). Les câbles utilisés sont prévus pour transporter de la moyenne
tension et forts courants à basse fréquence, mais on peut aussi y
véhiculer des signaux haute fréquence très basse tension et très faible
courant. De tels signaux, émis par exemple depuis une chambre pour être
transporté au salon, ne peuvent guère aller plus loin que le reseau
fermé de la maison, car ils ne passent pas le compteur EDF ou tout
du moins sont très fortement atténués. C'est un peu la raison pour
laquelle certaines choses sont autorisées de ce côté des ondes,
désormais de façon un peu plus contrôlée. On a eu droit à une époque à
une multitude d'appareils utilisant le secteur 230 V pour transmettre
des télécommandes ou de la voix (interphones dits sans fil), et il faut
reconnaitre que c'était un peu la pagaille, comme à chaque fois
qu'aucune normalisation ou recommandation ne vient appuyer les
orientations techniques des constructeurs. A l'écriture de ces lignes,
on trouve encore des télécommandes véhiculant les ordres sur les fils
du secteur, et des systèmes permettant de déployer un réseau
informatique dans toute la maison (boitiers CPL Ethernet). Le principe
repose sur l'emploi de filtres pour séparer les données utiles de la
tension secteur utilisée pour la seule fonction de fourniture
d'énergie. Pour que cela fonctionne bien et ne revienne pas trop cher à
la fabrication, il faut que les données additionnelles soient
véhiculées à une fréquence bien au-dessus de la fréquence du secteur.
Fréquence qui détermine de surcroit la quantité de données pouvant être
transmises dans une période de temps donnée. Placer des données
additionnelles de fréquence 100 Hz n'est guère raisonnable. Par contre
envoyer des données rythmées à 100 kHz est beaucoup plus facile
et même moins dangeureux. Exemple en page
Télécommande 007. Autre
exemple d'application des courants
porteurs : l'allumage d'ampoules électriques dans les wagons d'un
réseau de chemin de fer en modèle réduit, même quand la locomotive est
à l'arrêt. Ici les rails qui véhiculent une tension continue pour
alimenter le moteur de la locomotive, se voient appliquer en parallèle
un signal "haute fréquence" qui est filtrée ensuite au niveau du train
: filtrage consistant à séparer la tension continue et le signal HF
pour les faire aboutir là où ils sont utiles. Le signal HF est toujours
transmis même quand aucune tension continue n'est appliquée aux rails,
ce qui explique que les ampoules peuvent briller même quand la vitesse
de la locomotive est faible ou nulle.
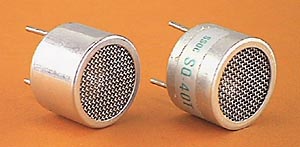
Télécommande à ultrasons (US)
Les télécommandes à ultrason ne sont plus guère utilisées de nos jours,
à cause principalement de leur encombrement, consommation
électrique, coût de fabrication, importante directivité et assez grande
fragilité. Elles mettent en oeuvre des transducteurs ultrasonores
chargés de transformer un signal électrique en déplacements d'air du
côté émetteur (comme le font les HP de votre chaine hifi), et de
transformer un déplacement d'air en un signal électrique, du côté
récepteur (comme le font les microphones, quelque soit leur type).
La
différence majeure par rapport aux transducteurs sonores
utilisés pour
la musique ou pour la parole est la bande passante, fort réduite
et
située dans une partie inaudible du spectre des
fréquences. Un exemple de télécommande à
ultrasons est proposé à la page
Télécommande 001.
Côté émission
L'émetteur
d'ultrasons est assez simple à réaliser, il est constitué d'un
oscillateur dont la
fréquence de fonctionnement est généralement de 36 kHz ou de 40 kHz, et
dont le coeur peut n'être qu'un simple NE555 ou quelques portes
logiques d'un circuit intégré du genre CD4011 ou CD4093. Cette
fréquence de
fonctionnement correspond à la fréquence de résonnance des
transducteurs, qui ont une bande passante très étroite : un
transducteur émetteur 40 kHz ne sort quasiment rien si on lui applique
un signal de fréquence égale à 39 kHz, et un transducteur récepteur 40
kHz ne délivre quasiment aucun signal électrique s'il reçoit un signal
de fréquence 39 kHz. La partie émetteur est la seule où un ajustage de
la fréquence est nécessaire si on souhaite une portée maximale. Si une
grande portée n'est pas nécessaire, on peut se contenter d'un
oscillateur à quartz ou d'un PIC programmé pour délivrer un signal de
fréquence fixe et stable de 36 kHz ou 40 kHz sans aucun réglage.
Côté réception
Le récepteur possède un étage d'entrée fort similaire à un
préamplificateur pour microphone. On lui demande en effet d'amplifier
le signal électrique délivré par le transducteur récepteur, qui peut
être très faible si le transducteur émetteur n'est pas placé dans l'axe
du transducteur récepteur. Cet étage d'entrée est suivi par un
redresseur à diode que l'on peut aussi appeler démodulateur AM
(modulation d'amplitude) dans le sens où l'amplitude du signal
périodique reçu est transformé en une tension continue proportionnelle.
Sauf que là on peut travailler en tout ou rien, puisqu'on ne module pas
le signal émis (on ne cherche pas à en modifier l'amplitude avec un
signal variable comme un signal audio). En résumé, le récepteur peut se
contenter d'une unique sortie qui renseigne sur le niveau de réception
des ultrasons : sortie active si ultrasons reçus avec assez de force,
sortie inactive dans le cas contraire.
Transmission de données
La
transmission de données au travers d'une liaison à ultrasons est
possible, mais elle prend du temps car la fréquence de la "porteuse"
(signal fixe qui sert de support de transmission) à une valeur faible.
Le débit des informations à transmettre ne peut par conséquent qu'être
faible, ce qui ne porte pas à conséquence si ces informations ne sont
pas complexes. On peut tout à fait envisager d'envoyer un signal à 40
kHz pendant 100 ms pour transmettre l'information "1", envoyer un
signal à 40 kHz pendant deux fois 100 ms avec un intervalle de 100 ms
entre les deux pour transmettre l'information "2", et envoyer un
signal à 40 kHz pendant trois fois 100 ms avec un intervalle
de 100 ms entre chaque "session" pour transmettre l'information "3". On
peut aussi jouer sur la durée de l'envoi du signal 40 kHz, tout comme
on
peut aussi envoyer des "0" et des "1" sur une longueur de 8 bits (ou
plus) pour transmettre un code parmi 256 (ou plus).
Télécommande à infrarouges (IR)
En complément des télécommandes HF, les télécommandes à infrarouge sont de loin les plus
répendues. Elles
permettent d'atteindre des portées de plusieurs mètres en
liaison
directe ou après réflexion sur les murs. Elles ne peuvent
par contre
pas être utilisées pour télécommander un
appareil situé dans une autre
pièce, les infrarouges ne pouvant traverser les murs. Les
émetteurs
font usage d'une ou plusieurs LED infrarouge et les récepteurs
font
usage, la plupart du temps, d'un seul photodétecteur sensible
aux
infrarouges. L'usage généralisé des
télécommandes à infrarouge a
conduit à inventer un système de codage universel auquel
se sont
ralliés un grand nombre de constructeurs, il s'agit du code
Philips RC5 (suivi
du code étendu RC6). Ce dernier impose un
certain
nombre de règles quand aux données à transmettre,
qui comportent des
informations relatives au fabricant, à l'appareil
concerné, et au type
ou à la valeur des diverses commande (volume, chaine, avance
rapide,
etc). Tout ceci bien sûr pour limiter les risques de voir deux
appareils différents réagir à une même
(télé)commande. Le détails des données
intimes que l'on peut trouver dans une trame RC5 est donné en
page
Télécommandes - IR - RC5 - Codes.
Une mise en pratique de codes RC5 émis par une
télécommande standard pour piloter des équipements
divers est proposée à la page
Télécommande 004.
Télécommande à lumière visible
Les
infrarouges ne se voient pas et cela est pratique ou cela n'est pas
pratique, tout dépend de ce que vous voulez faire ou vérifier. Il est
possible d'envoyer des ordres simple avec de la lumière visible émanant
d'une lampe de poche par exemple. Un tel exemple est visible en page
Télécommande 003.
Télécommande à haute fréquence (HF)
Ce type d'appareil permet de transmettre des informations même à
travers
des cloisons, les hautes fréquences pouvant traverser les murs. Point
besoin d'être en liaison (vue) directe entre émetteur et récepteur.
C'est le cas des télécommandes de garage, de voiture et de la majorité
des alarmes antivol. Beaucoup de télécommandes HF s'appuyent sur des
modules HF fonctionnant à 433 MHz ou 866 MHz, devenus courants et bon
marché (quelques modèles sont présentés à la page
Modules d'émission et de réception HF).
Télécommande par Ethernet / Internet
Un
réseau local ou étendu (LAN ou WAN) peut depuis de nombreuses
années être utilisé pour véhiculer des informations ou des ordres entre
des appareils distants. En s'appuyant sur une structure filaire ou sans
fil existante et sur des protocoles éprouvés, de multiples fonctions
peuvent être assurées de façon fiable. Bien sûr, réaliser une
télécommande qui s'appuie sur un tel type de réseau réclame davantage
de resources matérielles et logicielles, ainsi que des connaissances
approfondies. Pour ce genre de réalisation, il faut mettre les mains
dans le cambouis, se documenter, apprendre de nouveaux concepts de
programmation, essayer et essayer encore...
Codage des informations
La
sécurité des commandes peut être grandement améliorée si on utilise un
codage pour les ordres transmis, que le récepteur peut décoder en sens
inverse. Par exemple, au lieu d'envoyer un ordre simple de type marche
/ arrêt (circuit ouvert ou fermé par un interrupteur), on peut décider
d'envoyer un nombre pour la mise en marche et un autre nombre pour
l'arrêt. Par exemple envoi du nombre 14 pour la mise en route et envoi
du nombre 15 pour l'arrêt.
Comme un nombre ne peut pas être envoyé "en un seul bout" sur un fil
unique ou via une transmission lumineuse ou haute fréquence (HF), on
doit le traduire en une suite d'impulsions (de bits, pour être plus exact) envoyées les unes
après les autres. Le procédé le plus simple
consiste à envoyer un nombre d'impulsions égal à la valeur du nombre à
transmettre (procédé décimal, un procédé binaire
plus évolué conviendrait mieux pour des nombres supérieurs à 16). A la
réception, le récepteur compte les impulsions reçues
et en déduit que tel ou tel ordre a été envoyé. Cette façon de faire
diminue le risque de mauvaise interprétation par le récepteur mais
n'est pas infaillible. Dans l'exemple présent, il suffit qu'une
impulsion se soit perdue ou qu'un parasite se soit inséré dans la
séquence pour que les deux ordres reçus soient inversés. Pour augmenter
la fiabilité d'un tel procédé, on peut répeter trois fois de suite la
même commande. Si le récepteur ne reçoit pas trois fois de suite la
même chose, il considère qu'il y a eu erreur de transmission et ne fait
rien. Un exemple de télécommande capable de transmettre dix commandes
différentes (ou de piloter dix appareils différents) est proposée à la
page
Télécommande 002.
Un autre exemple de télécommande encore plus évoluée et permettant de
transmettre des infos multiples de façon bidirectionnelle, est montrée
en exemple à la page
Télécommande 009. Une autre méthode consiste à enchaîner plusieurs trains
d'impulsions dont la fréquence et le rapport cyclique sont tous deux
ajustables. Cela permet de disposer de plusieurs canaux avec pour
chacun d'eux la possibilité de véhiculer une valeur propre. C'est une
méthode dite "proportionnelle" qui était utilisée il y a quelques
dizaines d'années dans les radiocommandes multi-canaux. Elle faisait
usage de composants traditionnels (transistors et circuits intégrés
courants) et on peut sans problème imaginer mettre en oeuvre une telle
méthode avec un simple PIC "de base" tel qu'un 16F628A. Ce dernier
permet en effet très aisément de produire un signal périodique carré
dont la fréquence et le rapport cyclique peuvent être définis assez
précisement. Ainsi, avec un clavier 16 touches (câblé en matrice 4 x
4), on pourrait envisager la production de 8 fréquences indépendantes
pour 8 canaux, deux touches assurant alors les fonctions
marche et arrêt. Ou alors 16 fréquences indépendantes pour 16
canaux sur le principe 1 coup ça allume, coup suivant ça éteint. Et
cerise sur le gateau, on pourrait en fonction du temps d'appui sur
chaque poussoir, décider si on à affaire à une mise en fonction ou à un
arrêt... ou à un réglage de type "continu" (il suffit d'utiliser un
filtre passe-bas pour intégrer le signal reçu et développer une tension
continue proportionnelle au rapport cyclique). Je suis sûr que tout ça
va vous donner d'autres idées encore...
