
Electronique
> Réalisations
>
Commutateurs
audio > Commutateur audio 014 - Pro
Dernière mise à jour : 08/10/2014Présentation
Ce commutateur audio est destiné à être raccordé entre un microphone et l'entrée d'une console de mélange, et est doté d'un détecteur à infrarouge qui permet une mise en/hors fonction automatique du microphone. Quand personne ne se trouve devant le microphone, le commutateur est en position OFF (Mute activé), et il s'active (position ON, Mute désactivé) dès que quelqu'un s'approche. La détection de présence du chanteur (ou orateur ou musicien) est assurée par la réflexion (ou non réflexion) d'un faisceau infrarouge. Le circuit est basé sur un microcontrôleur PIC 16F88.Avertissement
Pro - Ce système a été conçu pour un usage pro et fait suite à une demande pro. Je ne peux donc pas le décrire ici dans le détail. Pour la même raison, le logiciel du PIC n'est pas mis en libre service.Principe général de fonctionnement
Le système possède une entrée micro et une sortie micro, et doit être installé sur le microphone ou juste à côté de lui. Un émetteur IR (infrarouge) envoie des impulsions en direction de la personne ou de l'instrument à diffuser et/ou enregistrer, et un récepteur IR analyse ce qui revient. Si une personne ou un objet est détecté à proximité, le système laisse passer le son qui provient du microphone. Si le système ne détecte rien, le son qui provient du microphone n'est pas transmis à la console (il est coupé ou atténué). L'analyse (détection de présence) s'effectue à un rythme de 10 fois par seconde. La commutation audio est assurée par des composants électroniques et le bruit de commutation est réduit au maximum. Le taux d'atténuation peut être ajusté entre 6 dB et 40 dB environ.Fonctions principales
- Distance de détection : entre 20 cm et 1 mètre (Nota 1).
- Très bonne réjection des rayonnements IR indésirables (lampes à incandescence ou fluocompactes, lumière naturelle).
- Alimentation : autonome, via la tension 48 V Phantom délivrée par la console (désactivation automatique du système en absence d'alim Phantom).
- Atténuation du niveau micro : ajustable entre -6 dB et -40 dB, sans bruit de commutation.
- Sortie de commande pour forçage d'autres systèmes placés en parallèle (pour ouverture d'un couple stéréo par exemple).
- Temps de réaction : 300 ms (0,3 sec) en mode normal, 100 ms (0,1 s) en mode "Turbo".
- Temps de relâchement (avant réactivation du Mute) ajustable entre 300 ms et 10 sec.
- 15 codes IR différents programmables (1 à 15) pour limiter le risque de mauvais déclenchement quand plusieurs systèmes identiques sont placés côte à côte.
- Reprogrammation possible du PIC sur site (connecteur ICSP)
Schéma
Le circuit est structuré autour d'un PIC 16F88.
(image volontairement floutée)
C'est le microcontrôleur qui assure l'ensemble des opérations. Il fournit à la LED IR (infrarouge) les impulsions à une fréquence bien précise, avec un rapport cyclique parfaitement défini. Le système est conçu pour délivrer des impulsions IR puissantes, tout en tenant compte du fait que l'alimentation Phantom n'est pas en mesure de délivrer une intensité de courant élevée.
Réglage de sensibilité (distance de détection)
Plusieurs solutions existent, mais deux viennent tout de suite à l'esprit : réglage de la puissance d'émission ou réglage de la sensibilité du récepteur. J'ai choisi la première solution pour deux raisons : premièrement il vaut mieux éviter de prélever du courant sur le 48 V Phantom quand ce n'est pas nécessaire, et deuxièmement le photorécepteur choisi n'offre pas trop de lattitude de ce côté-là... Le réglage de sensibilité s'opère par le potentiomètre RV1, qui permet d'ajuster la puissance d'émission du flux infrarouge.Analyse des données infrarouge reçues
Pour limiter le risque de mauvais déclenchements, et notament quand plusieurs systèmes identiques se trouvent côte à côte, un code spécial module la porteuse IR. Ce code dépend de l'état logique des 4 lignes RB4 à RB7 du PIC, configurées en entrées grâce aux cavaliers JP1 à JP4.- Code 0 -> JP4=0, JP3=0, JP2=0, JP1=0 - équivalent au code 1 (code 0 interdit)
- Code 1 -> JP4=0, JP3=0, JP2=0, JP1=1
- Code 2 -> JP4=0, JP3=0, JP2=1, JP1=0
- Code 3 -> JP4=0, JP3=0, JP2=1, JP1=1
- Code 4 -> JP4=0, JP3=1, JP2=0, JP1=0
- Code 5 -> JP4=0, JP3=1, JP2=0, JP1=1
- Code 6 -> JP4=0, JP3=1, JP2=1, JP1=0
- Code 7 -> JP4=0, JP3=1, JP2=1, JP1=1
- Code 8 -> JP4=1, JP3=0, JP2=0, JP1=0
- Code 9 -> JP4=1, JP3=0, JP2=0, JP1=1
- Code 10 -> JP4=1, JP3=0, JP2=1, JP1=0
- Code 11 -> JP4=1, JP3=0, JP2=1, JP1=1
- Code 12 -> JP4=1, JP3=1, JP2=0, JP1=0
- Code 13 -> JP4=1, JP3=1, JP2=0, JP1=1
- Code 14 -> JP4=1, JP3=1, JP2=1, JP1=0
- Code 15 -> JP4=1, JP3=1, JP2=1, JP1=1
Durant l'émission des IR, le système se met à l'écoute de ce qui revient sur le photo-détecteur. Si le signal reçu est de même fréquence et de même code que le signal émis, alors le système conclut qu'une personne ou un objet se trouve à proximité et désactive le circuit d'atténuation BF (Mute). Si le signal reçu est de même fréquence mais que le code reçu est différent de celui émis, cela signifie qu'un autre système est situé à proximité et qu'il a émis un code IR en même temps (ce qui déjà en pratique n'est possible que pendant 2% du temps). Un code reçu différent peut aussi signifier que la personne à détecter est en mouvement et à la limite de la zone de détection.
Temps de réaction et temps de relâchement
Le temps de réaction "de base" est de 100 ms (0,1 sec), mais une intégration (un moyennage) est mis en oeuvre pour que les commutations n'aient lieu qu'au terme de trois analyses consécutives, ce qui porte le temps de réaction effectif à 300 ms environ.- Détection présence : le Mute se désactive dès que 4 codes IR valides sont reçus à la suite (100 ms entre chaque).
- Détection absence : le Mute s'active sur deux conditions : la première condition est que le récepteur IR ne reçoit plus de code valide pendant au moins trois analyses consécutives, la seconde condition est que le temps de relâchement est atteint.
Remarque : le temps de réaction peut être diminué à 100 ms (0,1 s) en limitant à deux le nombre de codes reçus valides consécutifs. Pour cela il suffit de placer la broche RB0 du PIC (Speed) à la ligne d'alim positive (+3,3 V). Il pourrait être immédiat (désactivation vute à chaque code reçu bon), mais on a beaucoup plus de risques d'observer des coupures et rétablissements (Mute et Activation) parasites.
(Re)Programmation du système
Le circuit est doté d'un connecteur ICSP qui permet la reprogrammation sur site (sans retirer le PIC de son support). N'importe quel programmateur de PIC doté d'un port ICSP convient, il faut juste amener les fils (VPP, PGC, PGD, masse et éventuellement VDD) au bon endroit. Ici, compatibilité (point de vue ordre des fils) avec la majorité des programmateurs du marché et en particulier le PICkit3 de Microchip.Partie optique
La partie électronique est une chose, la partie optique (LED d'émission IR et photodétecteur IR) en est une autre. Il est difficile d'obtenir des distances de détection "élevées" avec un système simplifié à l'extrême. Pour obtenir une distance de détection de plusieurs dizaines de centimètres avec une bonne fiabilité, la partie optique doit être composée avec soin, en tenant compte des aspects purement lumineux : angle de rayonnement de la LED d'émission, diagramme de sensibilité du récépteur IR, fréquence d'émission (longueur d'onde de l'émetteur IR) et sensibilité du récepteur à cette longueur d'onde, distance entre émetteur IR et récepteur IR, indice de réfraction de la plaque de verre ou plastique posée devant les deux composants, etc. Dans la plupart des systèmes de mesure de distance basés sur les infrarouges, on constate des distances assez faibles entre l'émetteur et le récepteur (dans certains, il n'y a que 4 mm ou 5 mm, pensez à la taille des composants eux-mêmes). Pour ma part, je n'avais pas besoin de mesurer une distance avec précision puisque mon système fonctionne en tout ou rien. J'ai essayé différentes valeurs d'écartements, et ai conclu qu'une distance plus élevée (3 cm à 4 cm) pouvait être adoptée. Ceci dit aucun intérêt pour mon application qui nécessitait un boîtier compact. Bien sûr, il ne saurait être question de se contenter d'envoyer un flux lumineux fixe et de mesurer une tension en sortie d'un photodétecteur. Cela fonctionne mais uniquement pour des distances très courtes (quelques cm max) et dans un environnement non pollué par des rayonnements IR indésirables. Raison pour laquelle la LED IR délivre ici un flux lumineux modulé avec des données bien précises. Pour des mesures de distance précises, il faudrait faire appel à des systèmes plus perfectionnés, à base de modules IR pré-assemblés (Sharp GP2Y0A21YK par exemple), ou même encore par des circuits programmables à base de capteurs CMOS (avec filtres optiques et algorithme de "décodage" appropriés).Prototype
Réalisé dans un premier temps avec ma platine EasyPIC7 et une alimentation externe, puis ensuite sur une plaque sans soudure, énergie prélevée sur alimentation Phantom 48 V. Notez l'élégante méthode utilisée pour me repiquer sur le câble XLR... je n'avais plus de XLR femelle !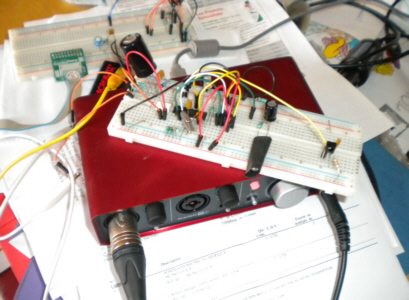
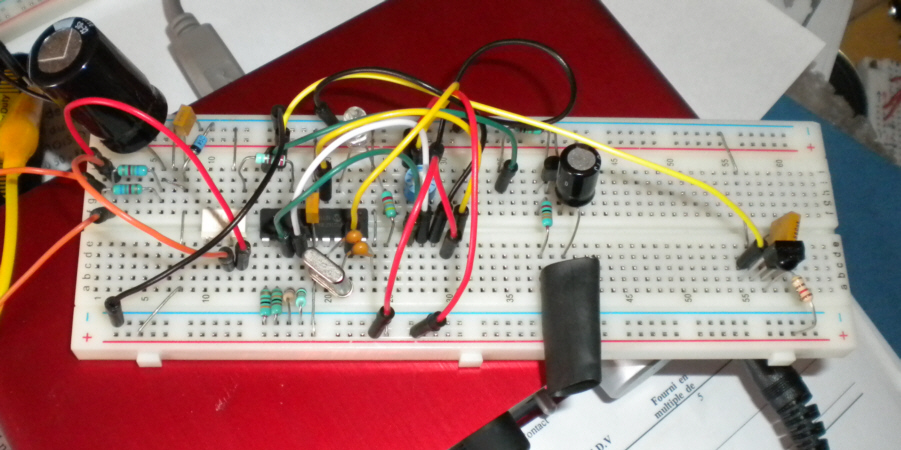
Avec ce prototype et en prenant soin d'isoler correctement la source IR du photo-récepteur IR, la distance de détection a pu être ajustée entre 20 cm et 1 mètre. Le système a été testé avec succès sur deux interfaces audio externes, une Focusrite Scarlett 2i2 et une RME FireFace 800.
Circuit imprimé
Aucun circuit imprimé proposé.Logiciel du PIC
Pro - Non mis à disposition sur ce site (projet pro).Historique
14/07/2014- Ajout infos utilisation générale.
06/07/2014
- Première mise à disposition.