
Electronique > Réalisations > Télécommandes > Télécommande 016 - Pro
Dernière mise à jour : 11/05/2025Présentation
Cette télécommande a été dévelopée pour piloter des moniteurs vidéo professionnels (type Konvision KVM1951W ou KVM2250W) par le biais d'une liaison Ethernet.
Elle dispose de plusieurs commandes utilisateur sous forme d'entrées logiques (boutons-poussoirs) et analogiques (potentiomètres). La télécommande peut être raccordée aux moniteurs en passant par un routeur (IP dynamique) ou par un switch non administrable (IP statique). Cette télécommande 016 existe également dans une version plus évoluée à base de PIC32MX, voir Télécommande 016b.
Schéma
Le schéma repose sur un PIC 18F46K22 associé à plusieurs circuits d'interface (Ethernet, RS232, RS422 ou RS485).
Dans l'utilisation actuelle, seule l'interface Ethernet est utilisée pour la fonction télécommande des moniteurs. La liaison série Tx1/Rx1 est utilisée pour le suivi des actions (log-historique) et pour la configuration des paramètres de liaison (adresse IP, port UDP, etc).
Fonctionnement général
Le PIC est constament en attente de commandes utilisateur et délivre les ordres idoines aux moniteurs via des trames UDP contenant les commandes au protocole TSL5.0. Pour les entrées logiques, une simple détection pression/relâchement est effectuée. Pour les entrées analogiques, une détection de changement nette de valeur de tension est effectuée. Les sorties pour commandes des moniteurs peuvent de plusieurs types :- liaison série RS232
- liaison série RS422 ou RS485
- liaison Ethernet
- GPIO (contacts secs via relais)
Sur le schéma, les options RS232 et GPIO sur relais ne sont représentées.
Commandes utilisateur
Les commandes utilisateur sont au nombre de 6 pour les voies logiques et de 4 pour les voies analogiques. A ce jour, seules les voies logiques sont exploitées. Le système a été conçu pour permettre une eventuelle extension du nombre d'entrées logiques et analogiques (jusqu'à 16 voies logiques et 16 voies analogiques).Interface Ethernet
Le microcontrôleur utilisé ne possédant pas de module Ethernet, un circuit d'interface ENC28J60 a été ajouté, la liaison de ce dernier avec le CPU se fait en SPI.Remarque : le choix d'un PIC comportant en interne un module Ethernet (par exemple PIC32MX675F512L ou PIC18F97J60) n'a pas été retenu par le demandeur, ce dernier ne désirant que des composants traversants pour une maintenance éventuelle plus aisée.
Interface série RS232
Module optionnel faisant usage d'un convertisseur style MAX232.Interface série RS422
Module optionnel faisant usage de circuit d'interface ligne de type MAX485/MAX487.Interface série RS485
Module optionnel faisant usage de circuit d'interface ligne de type MAX485/MAX487.Alimentation
L'alimentation requise par cette télécommande est de 5V ou 3V3. La tension d'alimentation fournie sur place pouvant être de 12V ou de 24V, un circuit de pré-régulation a été prévu.
Prototype
Réalisé conformément au PCB visible plus loin.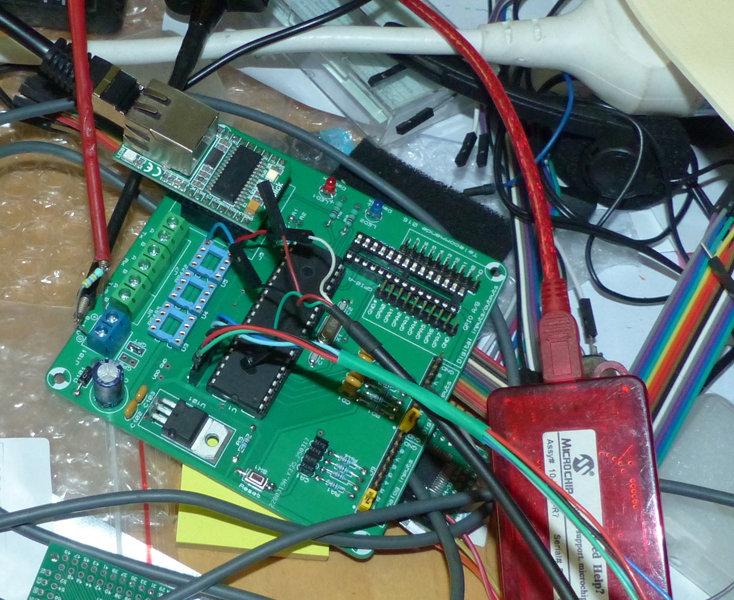

L'interfaçage Ethernet a été confié à un module Ethernet Click (Mikrobus) de la société Mikroe (photo du centre ci-devant).
Testé avec succès (fonctions de base On/Off, Tally Red/Green/Off) dans les deux conditions d'utilisation suivantes :
- en passant par un routeur / box Internet (avec ou sans lien Internet)
- en passant par un switch 8 voies non administrable (réseau local fermé, sans Internet).
Limites actuelles : le PIC choisi (18F46K22) dispose d'une quantité limitée de mémoire RAM et Flash. Cela a suffit pour les tests préliminaires (de faisabilité), mais un PIC disposant de davantage de resources sera requis pour permettre des extensions futures.
Circuit imprimé (PCB)
Réalisé en double face.
Logiciel du PIC
Logiciel de test (pour étude initiale de faisabilité) terminé et fonctionnel.Télécommande 016 - 18F46K22 - 16/04/2025
Pro - Logiciel non disponible en libre accès.
Historique
11/05/2025- Première mise à disposition.